05
伸缩因子
前面提到,为了得到伪旋转公式,我们把公因子cosθ忽略了,但在实际运算中,不能就这样简单粗暴抛弃。
我们再次对cosθ进行变形:
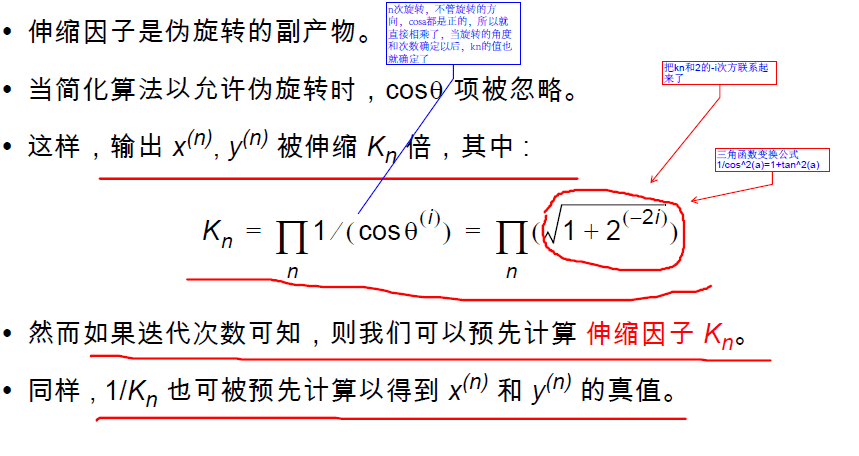
于是,我们可以得到:
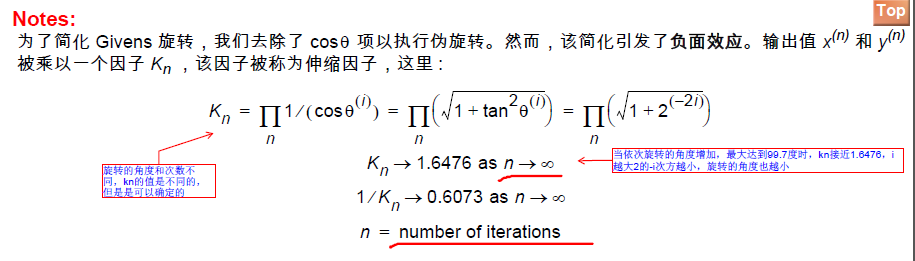
如果我们已知了将被执行的迭代次数,我们便可以预先计算出 1/Kn 的值,并通过将 1/Kn 与 x(n) 和 y(n)相乘来校正x(n) 和 y(n) 的最终值。
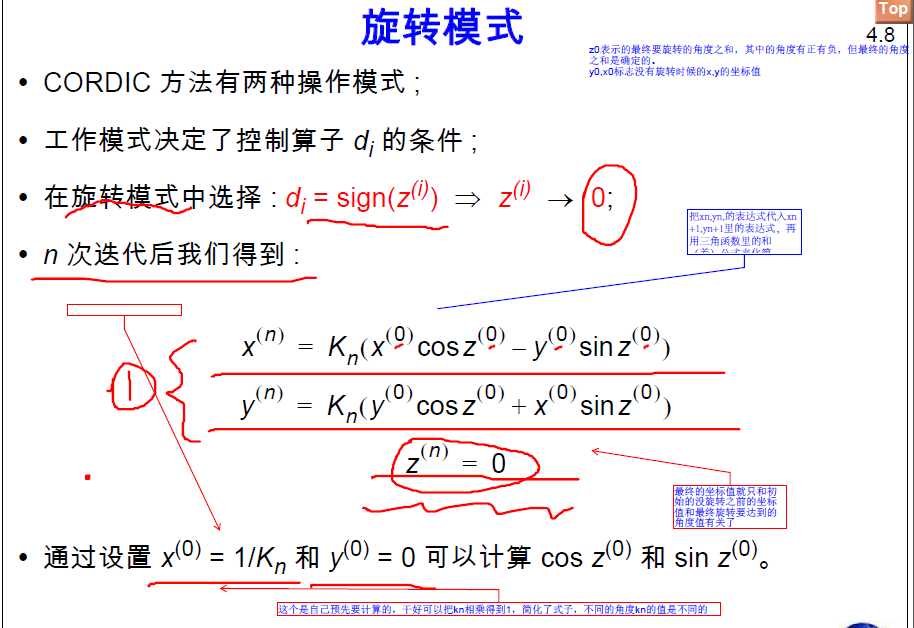
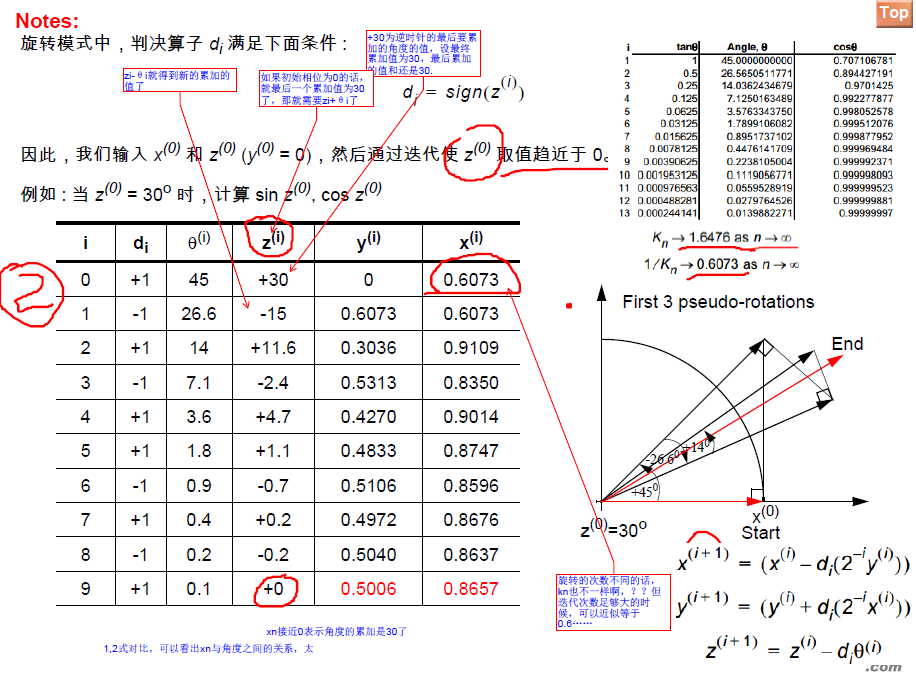
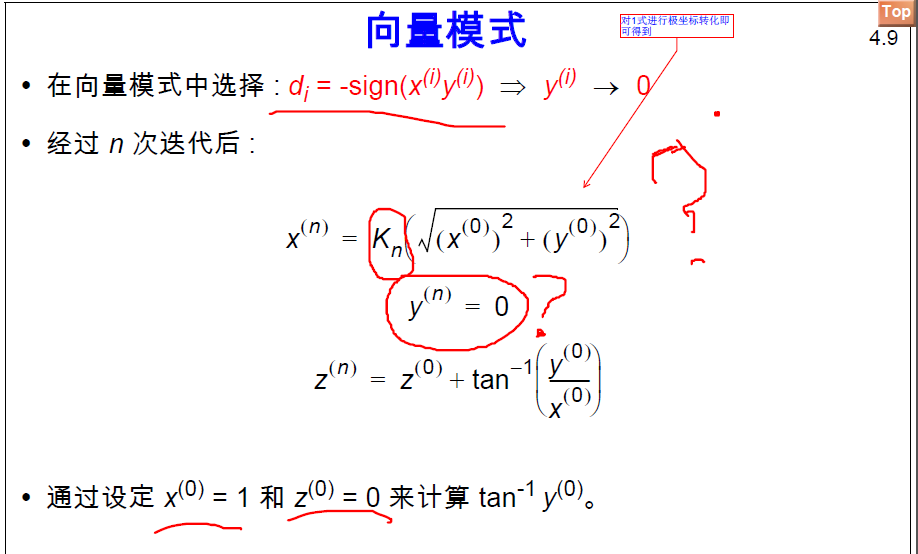
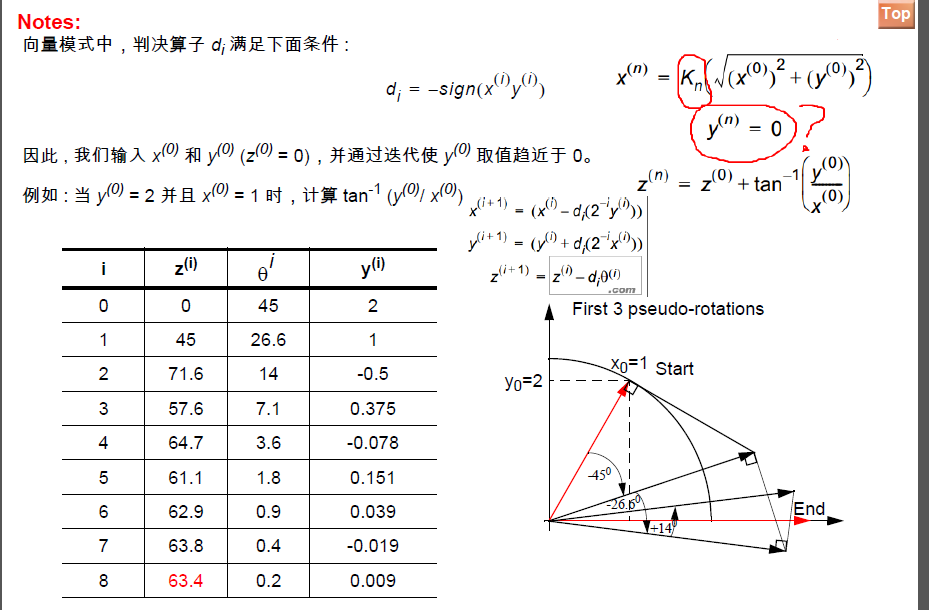
CORDIC有两种工作模式:旋转模式和向量模式。

05
伸缩因子
前面提到,为了得到伪旋转公式,我们把公因子cosθ忽略了,但在实际运算中,不能就这样简单粗暴抛弃。
我们再次对cosθ进行变形:
于是,我们可以得到:
如果我们已知了将被执行的迭代次数,我们便可以预先计算出 1/Kn 的值,并通过将 1/Kn 与 x(n) 和 y(n)相乘来校正x(n) 和 y(n) 的最终值。
CORDIC有两种工作模式:旋转模式和向量模式。












